EDIT: I've redone the MOSFET circuit diagram; it now represents what my actual layout is. I wanted to spare myself redrawing the circuit but ended up confusing everything, I hope it's clearer now! Also, I'm using IR2907 MOSFETs, in case this is useful to anyone
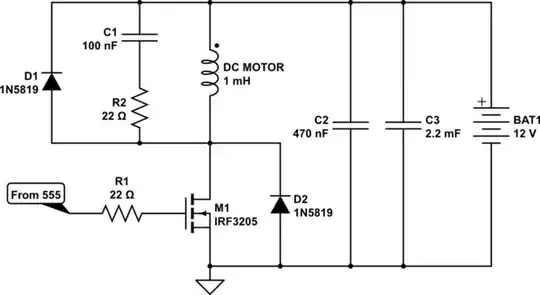
I'm currently trying to build a half-bridge PWM speed controller for a 24 V, ~100 A, 2 hp brushed dc motor (circuit schematic is at the end; I made it using parts of other schematics found on the net) (circuit layout pictures also in the post).
It worked fine when controlling a small 12 V toy car motor.
When I tried hooking up my final layout (2 hp motor, 12 V lithium battery for the driver Vcc, two 12 V car batteries in series for the motor), it worked fine until the driver (IR2103(S)) started smoking, then sparked and finally caught on fire (cf. following picture showing blown up driver).
[It seems like the blowup is located at pin number 6, which is vs. too much current going in the driver from the motor?]

Something I've noticed when driving both the small and large motors, is that the motor speed reaches a maximum at around ~80% of the 100 kΩ potentiometer range, then falls off when I would've expected it to keep increasing. The oscilloscope reading of the 555 output showed 100% duty cycle but with a lot of instabilities and noise when going in that region.
When I tested with the large motor, the driver blew out when I reached that "fall-off" region and stayed there for a few seconds. I also wasn't using the large 10 µF capacitor across the 24 V battery and the RC snubber.
Here are my ideas of what caused the driver failure:
Lack of capacitor across the 24 V battery
Lack of RC snubber across the motor
555 timer unstable beyond 80% of potentiometer range
Too much current going through the driver, causing it to fail due to overheating
Lack of MOSFET gate resistors?
Here are my questions:
Could you please help me identify what caused this driver failure?
Could you give me some advice to help me improve my driver circuit design (missing components, poor component choice, wires too long, parasitic inductance/capacitance, etc.)?
Could you help me understand and solve that 555 timer "fall-off" issue?
Here are the schematics of the circuit:


Here is a picture of the layout (without the motor and the batteries), with the MOSFET circuit on the right-hand side; I used aluminium strips for the large amperage (this will be cooled by a fan in the final build); I've also added a switch for the 24 V battery (in black); larger wires are the fours wires going to the MOSFET circuit (HO, LO, Vs and GND); smaller wires are Vcc, GND and the three potentiometer wires:

I thank you in advance for your time, knowledge and any advice you can give me, as drivers are quite expensive and I hate de-soldering components :)
Have a nice day!
ADDED:
@EdinFifić Is this the circuit you suggest I should try?:

There are a few things I don't quite get:
Using a driver with a second MOSFET will give a lower voltage drop on the "off" part of the PWM cycle because instead of going through the body diode (in red), the back-emf current will go through a fully conducting MOSFET (which has a lower voltage drop)? Have I understood right?
What are the advantages to using a driver (and a second MOSFET) apart from the lower voltage drop then? Maybe it is more useful for smaller motors where voltage drops matter a lot more?
Shouldn't there be some kind of buffer between the 555 output and the MOSFET gate?
Should the grounds of both the 12 V Vcc battery and the main motor battery be connected?
If I choose to use a driver, which one would you recommend and/or which datasheet characteristics should I pay the most attention to?
Thank you again for your time








{kind=link}