I'm building a serial servo controller to learn about electronics and assembly language as part of my hexapod robot project. Quite early on I decided that I needed more I/O channels than my ATTiny2313 that I was using at the time supported so I investigated some 3-8 line demultiplexer chips (CD74HCT238E's) which have allowed me to create a 64 channel PWM servo controller with just 8 I/O pins for the PWM channels and 3 address lines.
Anyway. I also bought some CD74HCT138E's which are active low rather than the active high CD74HCT238E's. I understand, in principal, the differences between the current sourcing chip that I'm using and the current sinking chips but I don't really know how to adjust my circuit to use the current sinking chips instead of the current sourcing chips.
The schematic for the active high chips is here:
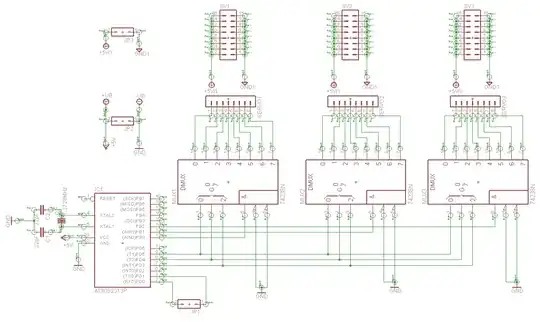 What do I need to change to swap the CD74HCT238E's for CD74HCT138E's?
What do I need to change to swap the CD74HCT238E's for CD74HCT138E's?
Note that the reason for asking this question is that I bought a tube of the active low ICs by mistake and I'm curious at how much more complex the schematic and circuit design would need to be for me to make use of them.