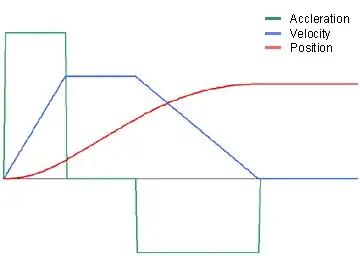
i have a stepper motor (controlled by an arduino) that moves some gears and a pulley. the problem is that the pulley jerks a lot: the movement begin and stop too much suddenly. to make the movement more fluid i think i can use a kind of ramp: the first movement are slow, when the motors has reached the velocity it keep going on, then smoothly slow down.
i have tried to use a sine wave in this way:
// generate ramp
float t = 0;
float deltat = PI/(200+1)
for(int i=0; i<200; i++) {
ramp[i] = 1000 - sin(t)*900;
t += deltat;
}
now i have a ramp of 200 elements that goes from 1000 (very slow) to 100 (very fast) following a sinus wave. now i move the motor with this code:
for(int i=0; i<200; i++) {
int delay_velocity = ramp[i];
digitalWrite(STEP_PIN, HIGH);
delayMicroseconds(delay_velocity);
digitalWrite(STEP_PIN, LOW);
delayMicroseconds(delay_velocity);
}
this works quite fine: the pulley does not jerk so much and i have control on how many steps to do.
but this work around has also problems:
- i can't make ramps very long (due to overflow in atmega) - say an array no more longer than 400 elements more or less (it depends on how long is the arduino sketch)
- i have control on how many steps but i have no idea on how many time it takes to get it completed (i think i can calculate it with some summation or integral but it is not so practical)
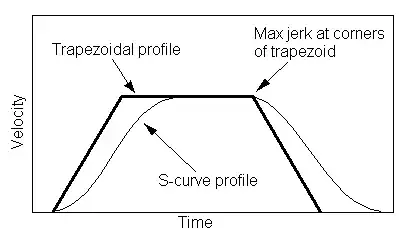
so i'm looking for some other way to smooth my movement. i think i can have a different curve instead of a sinewave. something more like this?
till now i don't have considered to generate the ramp in a computer and then pass it to arduino but could be a possibility.
some advice? thoughts?