I repair electric powered steering systems for cars, especially Fiat, Alfa, and Lancya (Delphi manufacturers), and I'm in need of making some tool to test these reparations. I mean just turning it on, for example.
I have researched during some time, and I figured I need CAN bus signals to be simulated as the eps ECU is receiving ignition packets from CAN. Here I go...
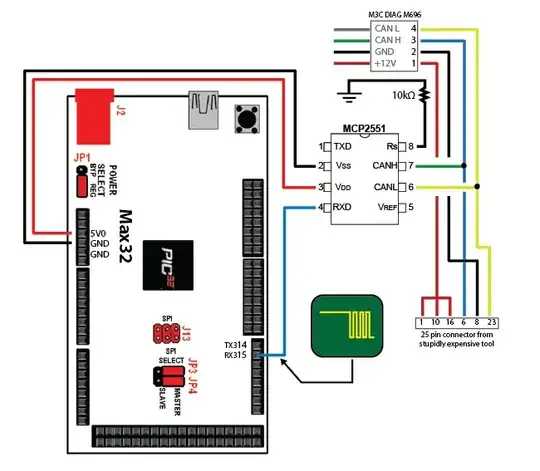
I need to know what way I could read and send CAN packets from/to the bus. I mean, what tool or anything else. I have been trying with Arduino Uno + a SparkFun CAN BUS Shield, but I don't get any results. When everything is connected, my serial console isn't sniffing any packets. I have connected all correctly, I think, and tried different bit rates, changed Arduino boards and shield, tried many different examples. I invested lots of hours with no profit... I was using SEAT Ibiza 2010 for I+D, connected CAN-H and CAN-L on the OBD port, in the CAN lines from the radio, etc...
Any idea of what could be wrong is welcome, as is a new method to make my project...
Information:
UPDATE 2 (28/12/2014): I used a multimeter because I dont have a oscilloscope. Reading the voltages are always giving me plain 2.5V on CAN-H and CAN-L, I get this readings at Arduino CAN-H CAN-L and in OBD2 Port (Pins 6 and 14)
UPDATE 3 (29/12/2014): I'm planning to switch to some programming language with a CAN interface, any suggestions are welcome, thanks!
UPDATE 3.1 (30/12/2014): Definitely, I'm taking another way to do this, I'm waiting Kvaser and ECOM to reply me in their support emails. That way we may know if their tools fit with my project. I will keep you updated, thanks for all the help guys! :)