I'm having a little trouble running my final bachelor experiment. My group and I are to find out what exactly causes extreme high frictional forces when pulling a steel cable through wet sand by varying the height of the sand above the cable.
We are, unfortunately, having problems with our motor. In labview we are using a ramp function to increase the voltage on the power supply over time. Usually from 0.4V to 4V in 400s where the sample rate of the entire system is 10ms. However we have noticed that when the frictional forces get too high, the motor starts acting up as shown in the graph below.
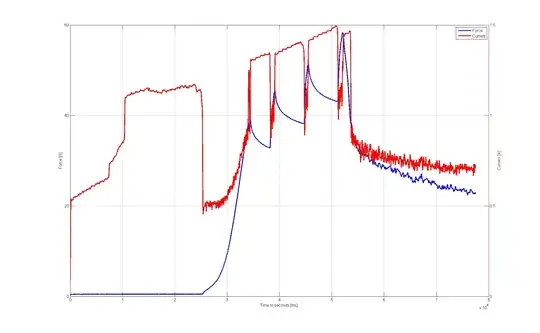
What you can see here is that as the voltage increases linearly (not shown) the current follows as well. We are measuring the force by placing a loadcell between the cable and the motor. As soon as the motor starts moving, the current drops and the motor starts pulling on the cable. The force starts increasing. But at some point the motor stops moving and the current shoots up. The decreasing force could be the tension being released from the pulley, the rope attached to the cable etc.
The stopping of the motor, however, could be caused by the fact that the frictional forces of the steel cable are too high (stick-slip). This is our problem. We don't want the motor to stop moving.
I was thinking of using a control loop to increase the speed at which the voltage increases, but I have no way of telling what the speed of the motor is. The tachometers we have won't work because the motor turns too slow. We only measure force, current and voltage.
EDIT: These are the motor specs: http://www.compucanjes.com/manuales/rs-555sh20.pdf
And this is how our (crappy) test setup looks
