I am making a simple motorised blind controller, which I want to have a "safety cut out" when it gets to its fully closed/fully open state. (So the user doesn't strain the motor keeping their finger on the button when it is open/closed.)
I'm a bit of a noob, but it seemed fairly straightforward in terms of logic.
Basically there will be a reflective IR sensor at the top, and at the bottom (level with the fully closed position of the blind). The logic is that when the user presses the up button, if the top sensor is high (i.e. the blind is in front of it) the motor will run until either they let go of the button or the sensor goes low (because the blind has passed it).
Similarly, if they press the down button, the motor will run in the opposite direction (controlled by an L293D chip) if the bottom sensor is low (i.e. not covered by the blind). Again this continues until the sensor goes low (blind has reached the bottom) or they let go of the button.
I've drawn up a schematic, and I think the logic is right, but I wanted to check if I need to protect the chips with resistors. I'll power it with a 5V 700mA mobile phone charger for the 5V supply, and I'll also need a separate 12V supply for the motor. (Will join the grounds from both).
Is there anything else I am missing, or any noob gotchas I need to be aware of?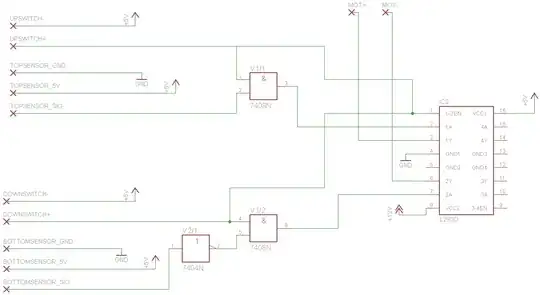
Also - if I have made any howlers on the schematic layout / broken any major conventions, please feel free to put me straight! (Can't figure out how to attach a clearer version as it looks like it has been scaled down to fit.)