I'm working on a simple project. I want to send a string. the string is "Rohalamin". the second board after recieve the string should turn on the LED.
the program for first board is (the MCU for this board is STM32F030F4):
/* Includes ------------------------------------------------------------------*/
#include "stm32f0xx_hal.h"
/* Private variables ---------------------------------------------------------*/
SPI_HandleTypeDef hspi1;
/* USER CODE BEGIN 0 */
/* USER CODE END 0 */
/* Private function prototypes -----------------------------------------------*/
void SystemClock_Config(void);
static void MX_GPIO_Init(void);
static void MX_SPI1_Init(void);
int main(void)
{
/* USER CODE BEGIN 1 */
/* USER CODE END 1 */
/* MCU Configuration----------------------------------------------------------*/
/* Reset of all peripherals, Initializes the Flash interface and the Systick. */
HAL_Init();
/* Configure the system clock */
SystemClock_Config();
/* System interrupt init*/
HAL_NVIC_SetPriority(SysTick_IRQn, 0, 0);
/* Initialize all configured peripherals */
MX_GPIO_Init();
MX_SPI1_Init();
/* USER CODE BEGIN 2 */
/* USER CODE END 2 */
/* USER CODE BEGIN 3 */
/* Infinite loop */
while (1)
{
}
/* USER CODE END 3 */
}
/** System Clock Configuration
*/
void SystemClock_Config(void)
{
RCC_ClkInitTypeDef RCC_ClkInitStruct;
RCC_OscInitTypeDef RCC_OscInitStruct;
RCC_OscInitStruct.OscillatorType = RCC_OSCILLATORTYPE_HSE;
RCC_OscInitStruct.HSEState = RCC_HSE_ON;
RCC_OscInitStruct.PLL.PLLState = RCC_PLL_ON;
RCC_OscInitStruct.PLL.PLLSource = RCC_PLLSOURCE_HSE;
RCC_OscInitStruct.PLL.PLLMUL = RCC_PLL_MUL6;
RCC_OscInitStruct.PLL.PREDIV = RCC_PREDIV_DIV1;
HAL_RCC_OscConfig(&RCC_OscInitStruct);
RCC_ClkInitStruct.ClockType = RCC_CLOCKTYPE_SYSCLK;
RCC_ClkInitStruct.SYSCLKSource = RCC_SYSCLKSOURCE_PLLCLK;
RCC_ClkInitStruct.AHBCLKDivider = RCC_SYSCLK_DIV1;
RCC_ClkInitStruct.APB1CLKDivider = RCC_HCLK_DIV1;
HAL_RCC_ClockConfig(&RCC_ClkInitStruct, FLASH_LATENCY_1);
__SYSCFG_CLK_ENABLE();
}
/* SPI1 init function */
void MX_SPI1_Init(void)
{
hspi1.Instance = SPI1;
hspi1.Init.Mode = SPI_MODE_MASTER;
hspi1.Init.Direction = SPI_DIRECTION_2LINES;
hspi1.Init.DataSize = SPI_DATASIZE_8BIT;
hspi1.Init.CLKPolarity = SPI_POLARITY_LOW;
hspi1.Init.CLKPhase = SPI_PHASE_1EDGE;
hspi1.Init.NSS = SPI_NSS_HARD_OUTPUT;
hspi1.Init.BaudRatePrescaler = SPI_BAUDRATEPRESCALER_32;
hspi1.Init.FirstBit = SPI_FIRSTBIT_MSB;
hspi1.Init.TIMode = SPI_TIMODE_DISABLED;
hspi1.Init.CRCCalculation = SPI_CRCCALCULATION_DISABLED;
HAL_SPI_Init(&hspi1);
}
/** Configure pins as
* Analog
* Input
* Output
* EVENT_OUT
* EXTI
*/
void MX_GPIO_Init(void)
{
GPIO_InitTypeDef GPIO_InitStruct;
/* GPIO Ports Clock Enable */
__GPIOF_CLK_ENABLE();
__GPIOA_CLK_ENABLE();
/*Configure GPIO pin : PA0 */
GPIO_InitStruct.Pin = GPIO_PIN_0;
GPIO_InitStruct.Mode = GPIO_MODE_EVT_RISING;
GPIO_InitStruct.Pull = GPIO_PULLDOWN;
HAL_GPIO_Init(GPIOA, &GPIO_InitStruct);
/* EXTI interrupt init*/
HAL_NVIC_SetPriority(EXTI0_1_IRQn, 0, 0);
HAL_NVIC_EnableIRQ(EXTI0_1_IRQn);
}
/* USER CODE BEGIN 4 */
/* USER CODE END 4 */
#ifdef USE_FULL_ASSERT
/**
* @brief Reports the name of the source file and the source line number
* where the assert_param error has occurred.
* @param file: pointer to the source file name
* @param line: assert_param error line source number
* @retval None
*/
void assert_failed(uint8_t* file, uint32_t line)
{
/* USER CODE BEGIN 6 */
/* User can add his own implementation to report the file name and line number,
ex: printf("Wrong parameters value: file %s on line %d\r\n", file, line) */
/* USER CODE END 6 */
}
#endif
the stm32f0xx_it.h file for handling interupt:
/* Includes ------------------------------------------------------------------*/
#include "stm32f0xx_hal.h"
#include "stm32f0xx.h"
#include "stm32f0xx_it.h"
/* External variables --------------------------------------------------------*/
extern SPI_HandleTypeDef hspi1;
uint8_t aTxBuffer[] = "Rohalamin";
/******************************************************************************/
/* Cortex-M4 Processor Interruption and Exception Handlers */
/******************************************************************************/
/**
* @brief This function handles System tick timer.
*/
void SysTick_Handler(void)
{
HAL_IncTick();
HAL_SYSTICK_IRQHandler();
}
/**
* @brief This function handles SPI1 global interrupt.
*/
void SPI1_IRQHandler(void)
{
HAL_NVIC_ClearPendingIRQ(SPI1_IRQn);
HAL_SPI_IRQHandler(&hspi1);
}
/**
* @brief This function handles EXTI Line 0 and Line 1 interrupts.
*/
void EXTI0_1_IRQHandler(void)
{
HAL_NVIC_ClearPendingIRQ(EXTI0_1_IRQn);
HAL_SPI_Transmit_IT( &hspi1 , (uint8_t*)aTxBuffer , 10 );
HAL_GPIO_EXTI_IRQHandler(GPIO_PIN_0);
}
And now the program for second board (the MCU for this board is STM32F103RET6):
/* Includes ------------------------------------------------------------------*/
#include "stm32f10x.h"
#include <string.h>
/* Private macro -------------------------------------------------------------*/
#define RxBufferSize 0x20
/* Private variables ---------------------------------------------------------*/
char RxBuffer[RxBufferSize];
uint8_t NbrOfDataToRead = RxBufferSize;
uint16_t RxCounter = 0;
char aTxBuffer[0x20] = "Rohalamin";
/* Private functions ---------------------------------------------------------*/
RCC_ClocksTypeDef RCC_ClockFreq;
ErrorStatus HSEStartUpStatus;
GPIO_InitTypeDef GPIO_InitStructure;
SPI_InitTypeDef SPI_InitStructure;
NVIC_InitTypeDef NVIC_InitStructure;
void SetSysClockTo72(void);
void GPIO_Configuration(void);
void NVIC_Configuration(void);
void _SPI1(void);
/*******************************************************************************
* Function Name : main
* Description : Main Programme
* Input : None
* Output : None
* Return : None
* Attention : None
*******************************************************************************/
int main(void)
{
SetSysClockTo72();
GPIO_Configuration();
_SPI1();
NVIC_Configuration();
SPI_I2S_ITConfig( SPI1 , SPI_I2S_IT_RXNE , ENABLE );
SPI_Cmd( SPI1 , ENABLE );
/* Infinite loop */
while (1)
{
if( strcmp(RxBuffer , aTxBuffer) == 0 )
{
GPIOB->ODR ^= GPIO_Pin_0;
}
}
}
/**
* @brief Sets System clock frequency to 72MHz and configure HCLK, PCLK2
* and PCLK1 prescalers.
* @param None
* @retval None
*/
void SetSysClockTo72(void)
{
/* SYSCLK, HCLK, PCLK2 and PCLK1 configuration -----------------------------*/
/* RCC system reset(for debug purpose) */
RCC_DeInit();
/* Enable HSE */
RCC_HSEConfig(RCC_HSE_ON);
/* Wait till HSE is ready */
HSEStartUpStatus = RCC_WaitForHSEStartUp();
if (HSEStartUpStatus == SUCCESS)
{
/* Enable Prefetch Buffer */
FLASH_PrefetchBufferCmd(FLASH_PrefetchBuffer_Enable);
/* Flash 2 wait state */
FLASH_SetLatency(FLASH_Latency_2);
/* HCLK = SYSCLK */
RCC_HCLKConfig(RCC_SYSCLK_Div1);
/* PCLK2 = HCLK */
RCC_PCLK2Config(RCC_HCLK_Div1);
/* PCLK1 = HCLK/2 */
RCC_PCLK1Config(RCC_HCLK_Div2);
/* PLLCLK = 8MHz * 6 = 48 MHz */
RCC_PLLConfig(RCC_PLLSource_HSE_Div1, RCC_PLLMul_6);
/* Enable PLL */
RCC_PLLCmd(ENABLE);
/* Wait till PLL is ready */
while (RCC_GetFlagStatus(RCC_FLAG_PLLRDY) == RESET)
{
}
/* Select PLL as system clock source */
RCC_SYSCLKConfig(RCC_SYSCLKSource_PLLCLK);
/* Wait till PLL is used as system clock source */
while(RCC_GetSYSCLKSource() != 0x08)
{
}
}
}
/*******************************************************************************
* Function Name : GPIO_Configuration
* Description : Configure GPIO Pin
* Input : None
* Output : None
* Return : None
* Attention : None
*******************************************************************************/
void GPIO_Configuration(void)
{
RCC_APB2PeriphClockCmd( RCC_APB2Periph_GPIOB , ENABLE);
/**
* LED1 -> PB0
*/
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_0;
GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz;
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_Out_PP;
GPIO_Init( GPIOB , &GPIO_InitStructure );
/**
* NSS -> PA4
SCK -> PA5
MISO -> PA6
MOSI -> PA7
*/
RCC_APB2PeriphClockCmd( RCC_APB2Periph_GPIOA , ENABLE );
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_4;
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_IN_FLOATING;
GPIO_Init( GPIOA , &GPIO_InitStructure );
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_5;
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_IN_FLOATING;
GPIO_Init( GPIOA , &GPIO_InitStructure );
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_6;
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_AF_PP;
GPIO_Init( GPIOA , &GPIO_InitStructure );
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_7;
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_IN_FLOATING;
GPIO_Init( GPIOA , &GPIO_InitStructure );
}
void _SPI1(void)
{
RCC_APB2PeriphClockCmd( RCC_APB2Periph_SPI1 , ENABLE );
SPI_InitStructure.SPI_Direction = SPI_Direction_2Lines_FullDuplex;
SPI_InitStructure.SPI_Mode = SPI_Mode_Slave;
SPI_InitStructure.SPI_DataSize = SPI_DataSize_8b;
SPI_InitStructure.SPI_CPOL = SPI_CPOL_Low;
SPI_InitStructure.SPI_CPHA = SPI_CPHA_1Edge;
SPI_InitStructure.SPI_NSS = SPI_NSS_Hard;
SPI_InitStructure.SPI_BaudRatePrescaler = SPI_BaudRatePrescaler_32;
SPI_InitStructure.SPI_FirstBit = SPI_FirstBit_MSB;
SPI_InitStructure.SPI_CRCPolynomial = 7;
SPI_Init( SPI1 , &SPI_InitStructure );
}
void NVIC_Configuration(void)
{
/* Enable and configure SPI1 global IRQ channel */
NVIC_InitStructure.NVIC_IRQChannel = SPI1_IRQn;
NVIC_InitStructure.NVIC_IRQChannelPreemptionPriority = 1;
NVIC_InitStructure.NVIC_IRQChannelSubPriority = 1;
NVIC_InitStructure.NVIC_IRQChannelCmd = ENABLE;
NVIC_Init(&NVIC_InitStructure);
/* Enable and configure RCC global IRQ channel */
NVIC_InitStructure.NVIC_IRQChannel = RCC_IRQn;
NVIC_InitStructure.NVIC_IRQChannelPreemptionPriority = 0;
NVIC_InitStructure.NVIC_IRQChannelSubPriority = 0;
NVIC_InitStructure.NVIC_IRQChannelCmd = ENABLE;
NVIC_Init(&NVIC_InitStructure);
}
/******************************************************************************/
/* STM32F10x Peripherals Interrupt Handlers */
/******************************************************************************/
/**
* @brief This function handles SPI1 global interrupt request.
* @param None
* @retval None
*/
void SPI1_IRQHandler(void)
{
if(SPI_I2S_GetITStatus( SPI1 , SPI_I2S_FLAG_RXNE ) != RESET)
{
/* Read one byte from the receive data register */
RxBuffer[RxCounter++] = (SPI_I2S_ReceiveData(SPI1) & 0x7F);
if(RxCounter == NbrOfDataToRead)
{
/* Disable the SPI1 Receive interrupt */
SPI_I2S_ITConfig(SPI1, SPI_I2S_IT_RXNE, DISABLE);
}
}
}
#ifdef USE_FULL_ASSERT
/**
* @brief Reports the name of the source file and the source line number
* where the assert_param error has occurred.
* @param file: pointer to the source file name
* @param line: assert_param error line source number
* @retval None
*/
void assert_failed(uint8_t* file, uint32_t line)
{
/* User can add his own implementation to report the file name and line number,
ex: printf("Wrong parameters value: file %s on line %d\r\n", file, line) */
/* Infinite loop */
while (1)
{
}
}
#endif
several pictures of my project:
the circuit doesn't work. I don't know why! My Saleae logic shows me this:
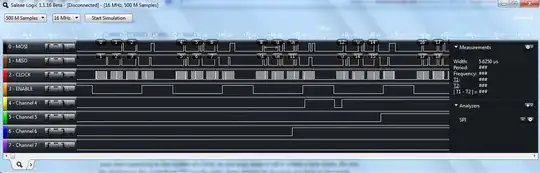
What's the problem?
Edit: I changed the codes and Now they work better! the first problem was that I forgotten to high and low the NSS pin. I changed the code and now it works better than before. as you can see in Saleae, the data is odd (in other word, it's not "Rohalamin").