Digital signal processing in radar applications is usually done using finite impulse response filters. Why is that the case? Wouldn't the use of an infinite impulse response filtering be much faster and feasible since we are talking about processing in the gigahertz range?
Asked
Active
Viewed 5,028 times
7
-
1You got some good answers below, but you might also want to try this one at dsp.stackexchange.com. – The Photon Jan 19 '12 at 18:13
3 Answers
7
Radar often uses phase as part of the signal. After down converting you are going to have a signal that is normally "relatively" low frequency(kHz compared to GHz).
When designing a Digital filter you can get very good brick wall filters. The major difference is that FIR filters can be symmetric and have linear phase delay. Linear phase delay means a flat group delay which correlates to the phases being preserved.
When phase is a major part of your signal(in CWFM radar it makes up the position part of the signal) any phase delay can cause a incorrect reading.
Kortuk
- 13,362
- 8
- 60
- 85
5
AFAIK they are not really doing the processing in the gigahertz range (how many chips do you know that can perform several multiplications and additions for each sample at multi gigahertz sample rate). The only way it can work is by up- and downconverting (using mixers) to baseband and operating on that.
Returning to your question: IIR filters are fast but their performance is as good (or rather as bad) as their analog counterparts. FIRs on the other hand can have any phase and frequency response if you are willing to pay for lots of taps. OTOH long FIRs can be quite efficiently computed using FFT overlap-add methods. FIRs can also be quite easily tuned on-the-go to get adaptive filters.
In general check The Scientist and Engineer's Guide to Digital Signal Processing book. It is a great book about DSP with lots of practice and not too much theory.
jpc
- 5,302
- 1
- 24
- 45
-
1I have built CWFM radar before, it was very fun. We down-convetered to signals that mostly stayed below 100kHZ. – Kortuk Mar 21 '11 at 03:36
4
Both answers are very good, but I hope my 2cents and a different perspective will add some value. I am in the middle of having to do essentially the same thing as a radar system.
Baseband versus RF
First off, Radar can be viewed very similar to wireless communication systems in that you have a baseband signal that you modulate, transmit, and then demodulate. Often phase shift keying is used in comm systems. In PSK, you are trying to detect a phase shift, usually between -pi and pi and based off of that phase shift you would determine the bit that was being sent.
In radars, the delay/reflection time creates what can be viewed as a phase shift. The only problem is that the delay in a radar is more then likely going to be greater then the 2*pi span that you can detect normally. In order to get a greater range you have to turn off your signal and wait long enough for you to receive the reflected signal.
In Radars, you could use an envelope detector and/or an RF mixer. An RF mixer is the same as a multiplier.
DSP
The key at this point is to remove all noise and determine the time delay between when you transmitted and where your current signal is at. Just like the comm systems, this delay can be viewed as a phase shift. Because of this you want your filter to have a linear phase response otherwise you wouldn't be able to tell (at least not easily) what delay your signal actually had. Here is an example of the frequency response of an FIR filter I just made:
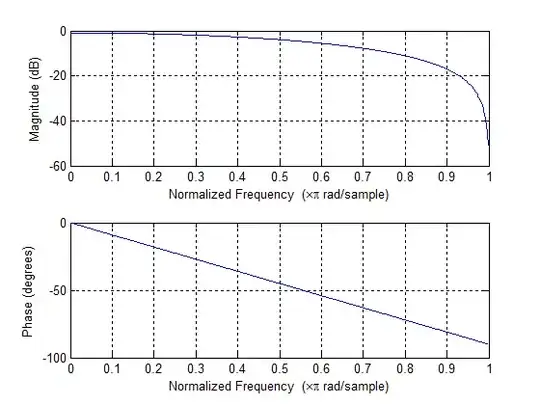
As I am sure you can see, the phase graph is a straight line, so it is linear.
Now here is an example of an IIR with similar passband and stop band specifications:
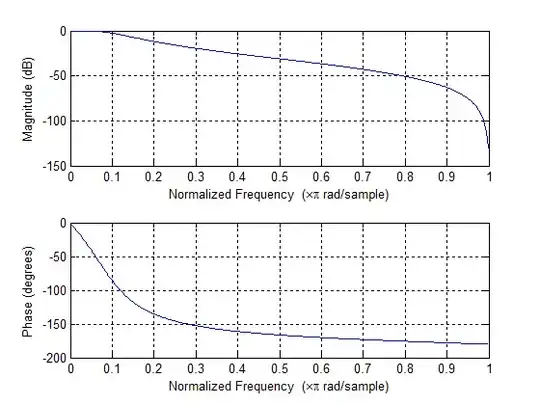
The phase graph isn't so linear this time. Now it is possible to reverse this phase effect in your delay time calculations, but it usually isn't worth the effort, instead people just use an FIR filter.
Kellenjb
- 17,509
- 5
- 51
- 87
-
1as someone whom has done radar "In order to get a greater range you have to turn off your signal and wait long enough for you to receive the reflected signal" is not true. There are many methods around this. In CWFM radar we are sweeping a frequency range and measuring back the different phases. as you increase your sweep you increase the number of points and range you can distinguish. So for really long range you need high power and a decent sweep, honestly with good equipment you just need high power, a couple GHz works on the sweep. – Kortuk Mar 23 '11 at 01:00
-
@AngZhiPing, the important part from his graph is the linear phase corresponds to a **flat* group delay, the same delay for each frequency. Linear phase filter corresponds to a symmetric filter in the time domain impulse response which is not physically possible with an IIR filter as you would need an anti-causal system. – Kortuk Mar 23 '11 at 01:01
-
Though I understand group delay, would be good if you can add on the corresponding group delay graphs for added clarity. – Ang Zhi Ping Mar 24 '11 at 01:21