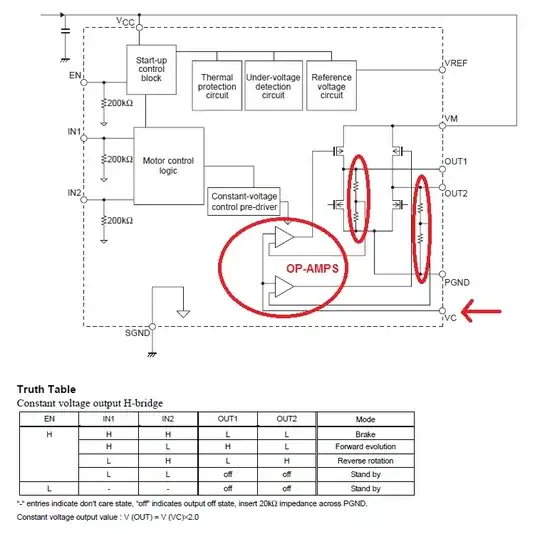
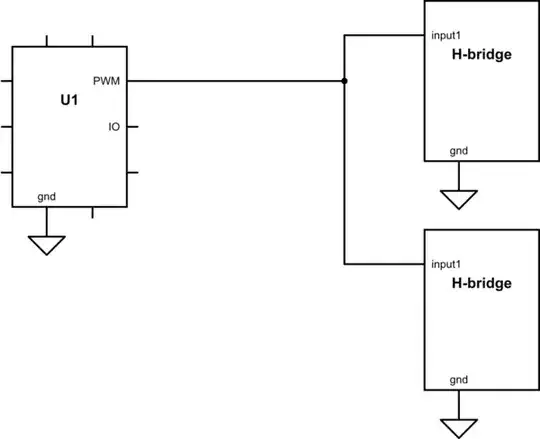
I am using ATMega16L and I'm using two DC motors to build an autonomous robot. I want to use an h-bridge to control the two motors. Can I use a single PWM output from say Timer1 on the microcontroller to control two h-briges so that the motors can go forward at the same speed, go reverse at the same speed and change direction by making one motor go forward and the other in reverse?
Can I connect OC1A PWM output from the microcontroller to be an input to 'IN1' pin on both h-bridges while 'IN2' is low so that robot goes forward and vice-versa to make the robot go backwards. I am not sure how to connect the circuit to share OC1A output to control these h-bridges.
{kind=link}