I have an old RC car. I removed all electronic from it, just left the plastic and the DC motors. It has 2 DC motors(1 for moving, 1 for left/right). I decided to attach arduino to it, while controlling the motors with the L293D H-Bridge. I wired it like this:
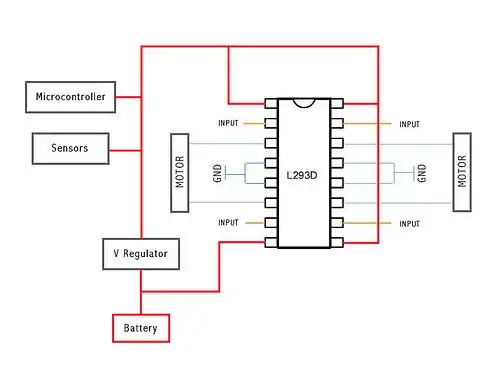
I noticed that motors are not running at full potencial(much slower with the h-bridge, then if I wire it directly to the battery). Also the L293D temperature goes insane(maybe 70-80C in 2-3 seconds) while motors are running. I rechecked all connections and spoils few time, they look good. I'm using a 7.2V 700mAh battery and since I didn't replaced the motors I'm not sure at what current do they work, tho they should work fine with voltage up to 12V.
My first thought was that maybe the L293D cannot handle the motors current, that's why it's overheating. After little research I found
The L293D is rated for 0.6A continues and 1.2A peak per 1 channel.
but my battery is 700mah so I think that's not the problem.
What might be causing this overheating and why my motors aren't running at full speed?